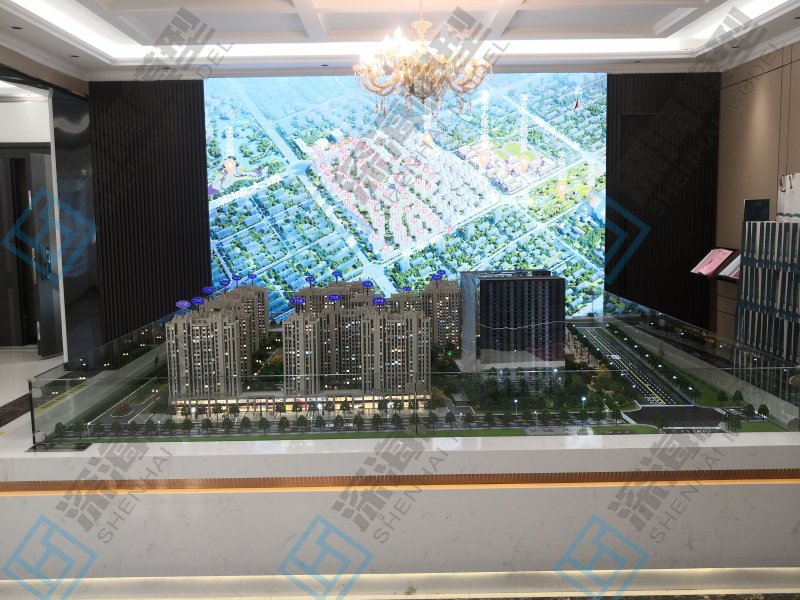
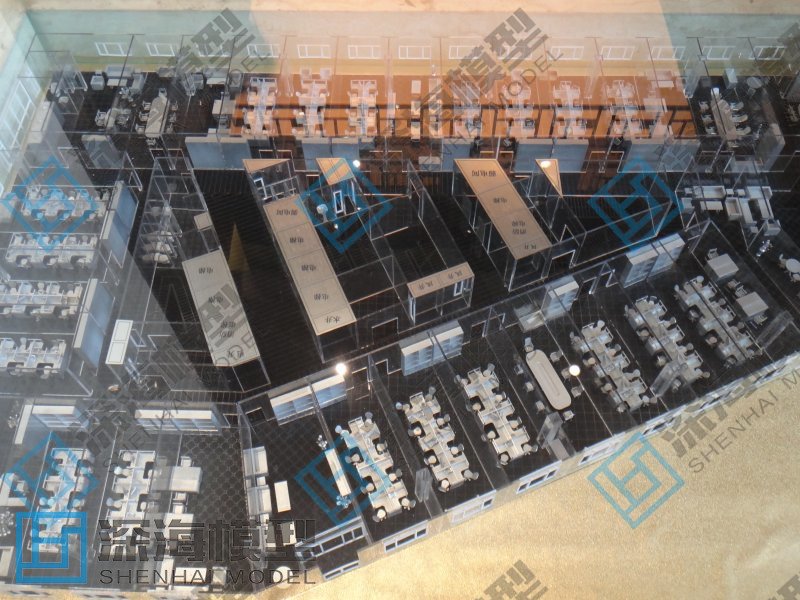
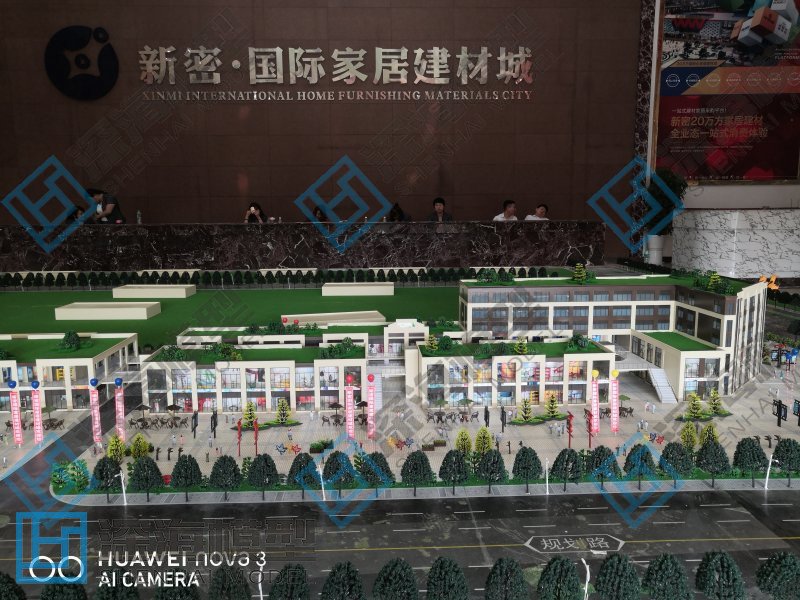
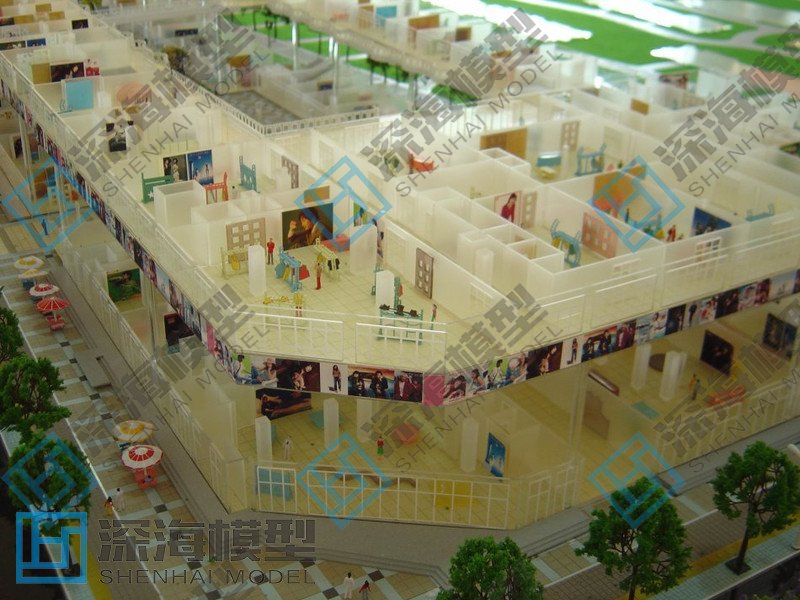
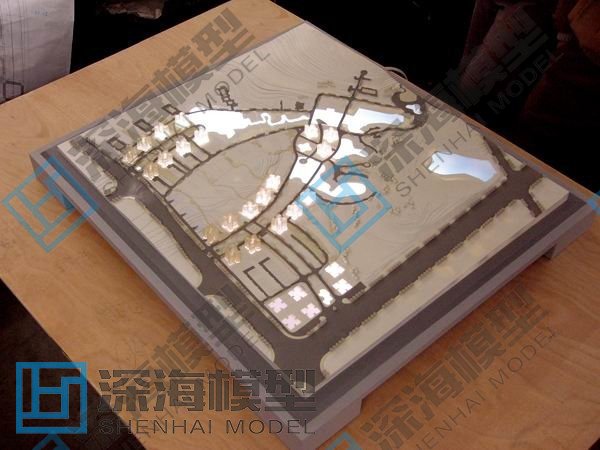
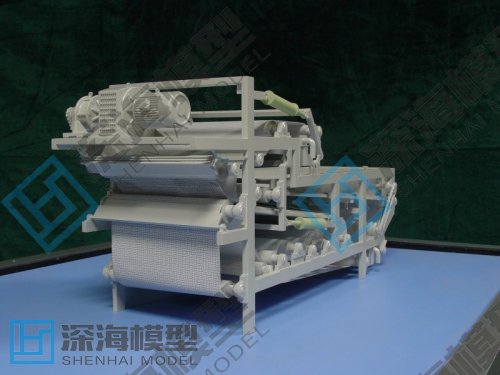
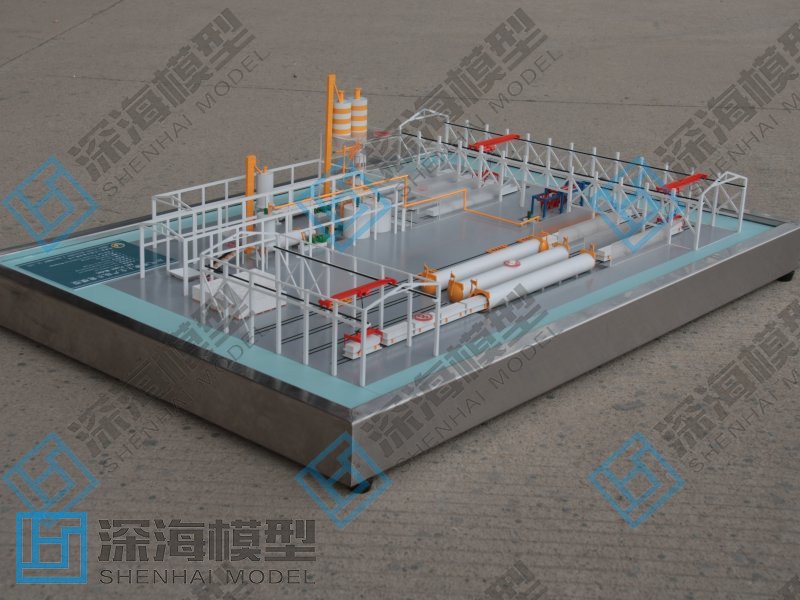
MODEL WORK DISPLAY
ABOUT US
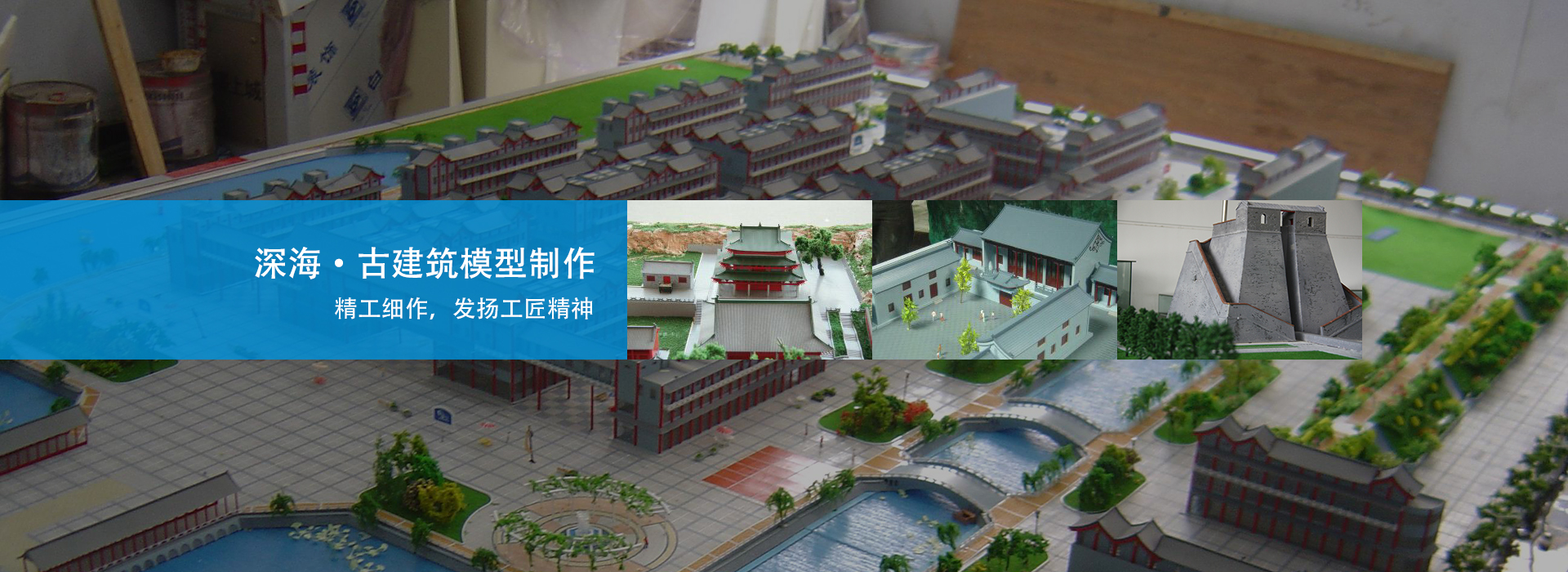
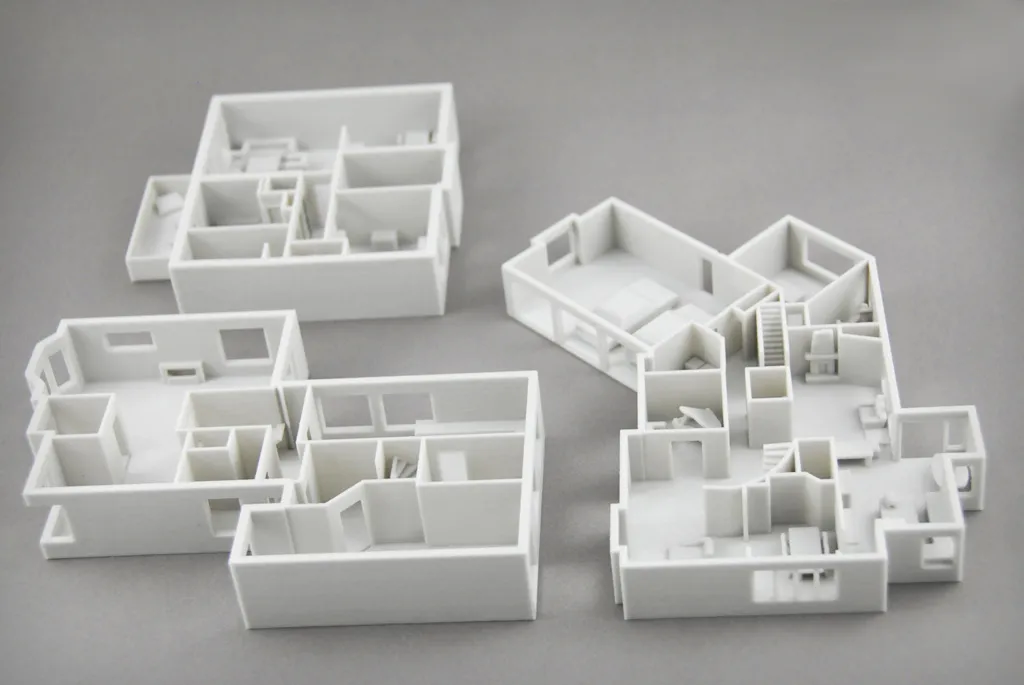
郑州深海模型设计有限公司是经郑州市工商局批准成立的集模型及其配件制作,商业展示为一体的专业公司。公司目前拥有员工数十人,技艺精湛。深海自成立开始就本着要么不做,要做就做第一的思想。深海认为品质是模型成就客户价值的第一要素,提出“品质筑就基石”的产品价值观,要做工艺最好、技术最好、服务最好、管理最好、美誉度最高的模型公司。深海注重高新技术的应用,在设备和材料的投入上不惜成本。深海以打造企业品牌为主导思想,以真诚、信誉、品质、服务为企业理念...

NEWS CENTER
全国咨询热线
0371-63782005
联系人:田经理
手 机:15238361199
地 址:郑州市金水区东风路354-3-2-17

Copyright © 2020-2021 郑州深海模型设计有限公司 版权所有 豫ICP备2021030991号 XML地图 免责声明:本站部分内容来源于网络,如有侵权请联系我们删除,谢谢。
服务热线